
We are happy to announce that we will be presenting the MobyDex research project during this year’s science forum on mobility (Wissenschaftsforum Mobilität) in Duisburg. The presentation will take place in Track 4 (Session 2) on Thursday, June 13th, 2024. Besides from describing the project idea and goals, the presentation […]
News
168 posts
Title: A visual foreign object detection system for wireless charging of electric vehicles Authors: Bijan Shahbaz Nejad, Peter Roch, Marcus Handte and Pedro José Marrón Abstract: Wireless charging of electric vehicles can be achieved by installing a transmitter coil into the ground and a receiver coil at the underbody of […]
We are happy to announce that the kickoff meeting of MobyDex took place on November 22nd, 2023. During the kickoff, the partners of the MobyDex consortium not only presented the project objectives, approach and expected outcomes but also discussed their individual contributions as well as their research or commercial interests. […]
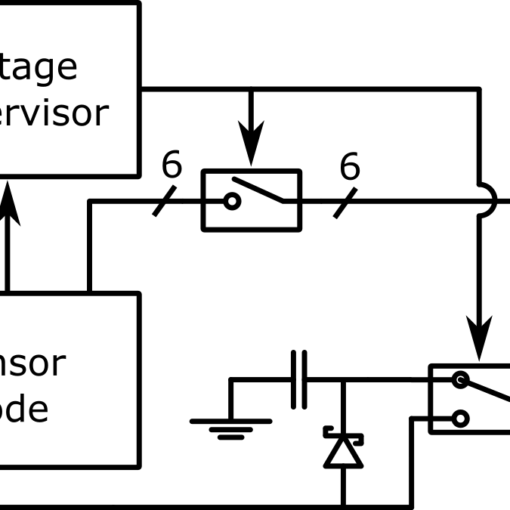
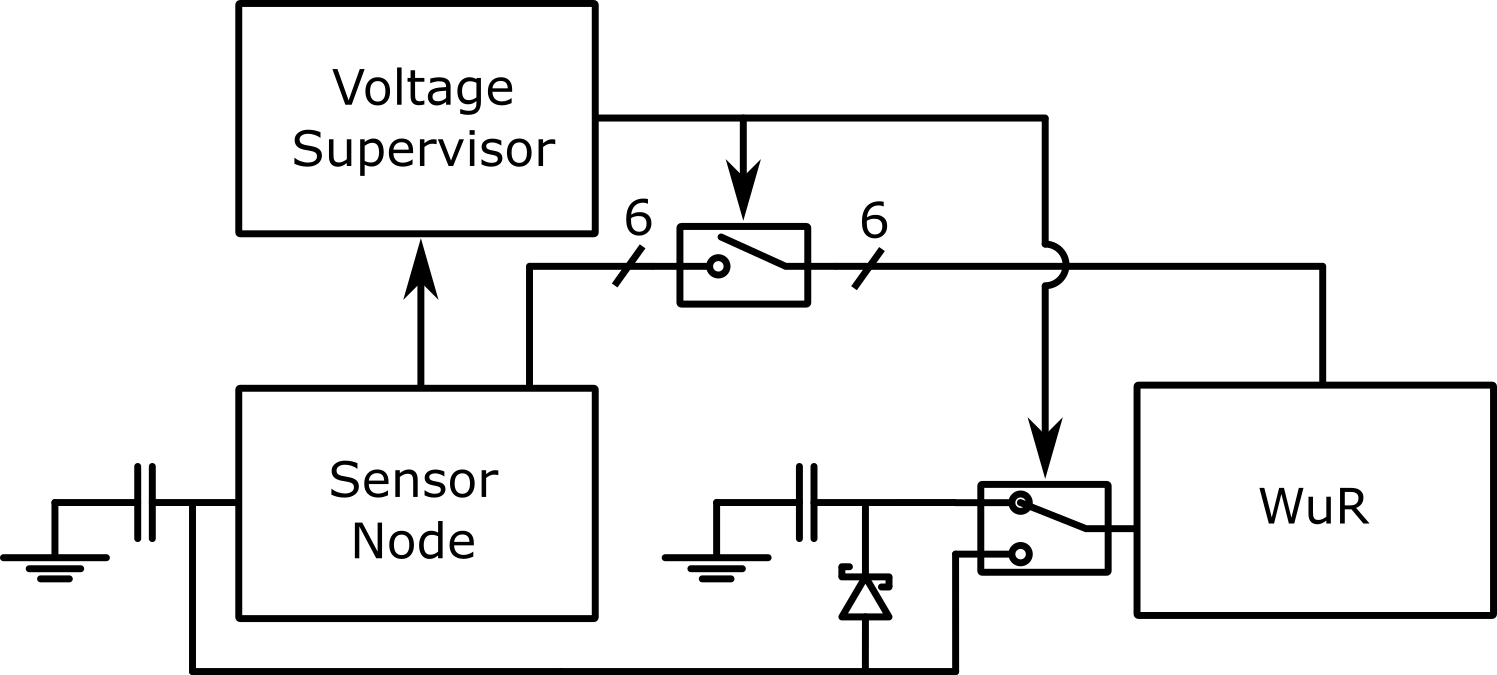
We are happy to announce that our paper got accepted and published at the 11th International Workshop on Energy Harvesting & Energy-Neutral Sensing Systems (ENSsys 2023) Title: EPICURUS: Energy Provlsioning for the start-up proCedUre of batteRyless, wake-Up receiver-enabled Sensors Authors: Sayedsepehr Mosavat, Pedro José Marrón, Matteo Zella Abstract: Batteryless, energy-harvesting […]
We are happy to announce that our contribution to the 15th International Conference on Knowledge Management and Information Systems (KMIS23) titled “Discovering Potential Founders Based On Academic Backgrounds” by Arman Arzani, Marcus Handte, Matteo Zella, and Pedro José Marrón received this year’s award for the best poster presentation.

A paper is accepted at the 15th International Conference on Knowledge Discovery and Information Retrieval Title: Challenges in Implementing a University-based Innovation Search Engine Authors: Arman Arzani, Marcus Handte, Pedro José Marrón Abstract: In universities, technology transfer plays an important role in the joint development and dissemination of knowledge as […]

Title: Optimizing PnP-Algorithms for Limited Point Correspondences Using Spatial Constraints Authors: Peter Roch, Bijan Shahbaz Nejad, Marcus Handte and Pedro José Marrón Abstract: Pose Estimation is an important component of many real-world computer vision systems. Most existing pose estimation algorithms need a large number of point correspondences to accurately determine […]
A paper is accepted in the 15th International Conference on Knowledge Management and Information Systems Title: Discovering Potential Founders based on Academic Background Authors: Arman Arzani, Marcus Handte, Matteo Zella, Pedro José Marrón Abstract: Technology transfer is central to the development of an iconic entrepreneurial university. Academic science has become […]
A paper is accepted in the 7th International Conference on Information System and Data Mining Title: Exploiting Topic Modelling for the Identification of Untapped Scientific Collaborations Authors: Arman Arzani, Marcus Handte, Matteo Zella, Pedro José Marrón Abstract: Finding potential collaborators has become a challenge due to the growing number of […]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
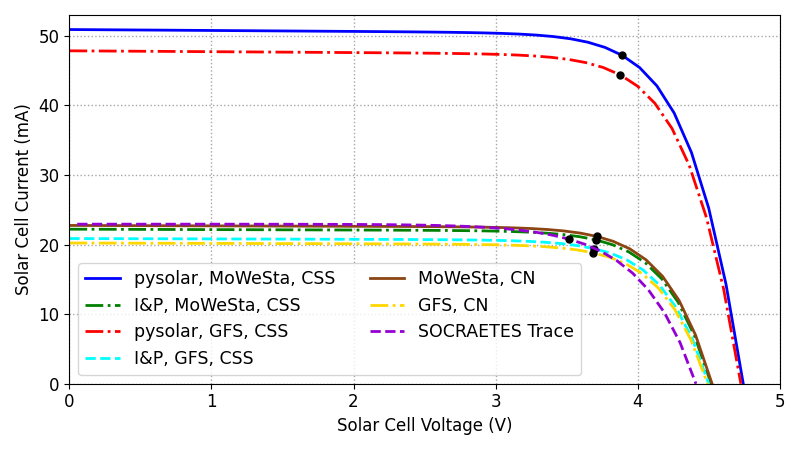
We are happy to announce that our paper got accepted and published at the 10th International Workshop on Energy Harvesting & Energy-Neutral Sensing Systems (ENSsys 2022) Title: PROGNOES: Prediction of haRvestable sOlar enerGy based on suN irradiatiOn and wEather conditionS Authors: Sayedsepehr Mosavat, Pedram Golkar, Matteo Zella, Pedro José Marrón […]